
Perfecting Flight
As a passionate FPV drone pilot, you’ve probably come across the term “PID tuning” during your adventures in the skies. Mastering PID tuning is essential for unlocking the full potential of your drone, ensuring it delivers peak performance, stability, and responsiveness. So, let’s explore this crucial aspect of drone flight in detail.
In PID tuning, the goal is to find the perfect settings where your drone operates flawlessly. Whether you prioritize a responsive, oscillation-free flight or a smooth, agile stick response, striking the perfect equilibrium is key.

What is PID?
PID, short for Proportional, Integral, Derivative, is a vital algorithm embedded within the software of a flight controller. It plays a crucial role in interpreting data from sensors and radio stick commands, enabling accurate adjustments to motor speed. This ensures that the FPV drone rotates at the desired rate, contributing to stable and controlled flight.
Terminologies
Set-point : Refers to the desired rotational rate, determined by multiplying the input from the control sticks by the rates assigned within the flight controller software.
Error : the difference between set-point (how fast we want the drone to rotate), and the gyro sensor’s measurement (how fast the drone is actually rotating).[set-point – gyro measurement]
Looptime : The frequency at which the flight controller’s PID loop operates
The primary aim of PID tuning is to minimize the deviation between the desired setpoint and the actual performance of the drone. This optimization process is crucial for refining the drone’s flight behavior, ensuring precise and consistent response to the pilot’s commands.
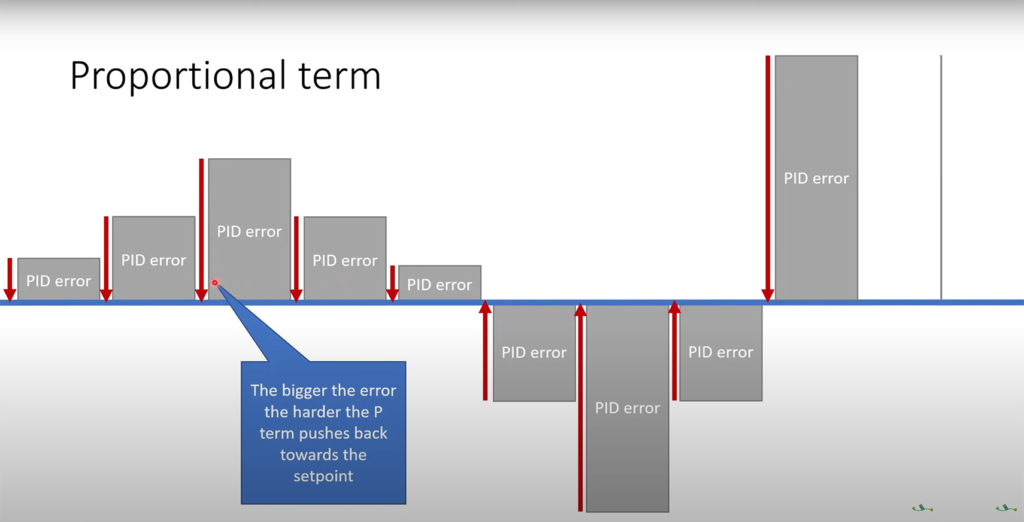
Proportional (P):
Proportional control adjusts the output based on the current error between the desired setpoint and the actual value. The output is directly proportional to this error, meaning that larger errors result in larger corrective actions.
The proportional term adjusts motor speeds based on the current difference between the desired setpoint and the drone’s actual performance, providing immediate corrective action to reduce this error.
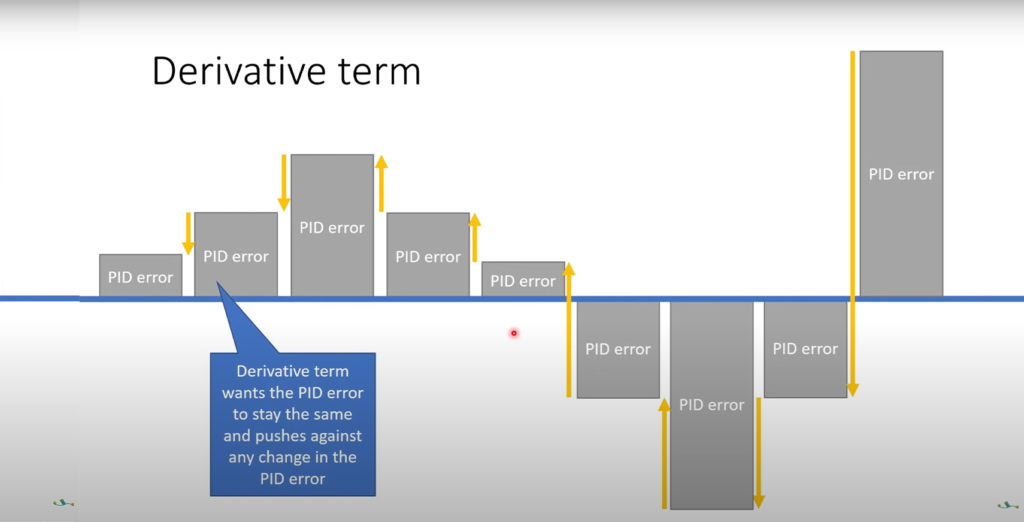
Derivative (D):
Derivative control anticipates the future trend of the error signal by measuring its rate of change. It provides a damping effect to counteract rapid changes in the error and prevent overshooting or oscillations.
The derivative term adjusts motor speeds based on the rate of change of the error, helping to stabilize the drone’s response and minimize overshooting during rapid maneuvers.
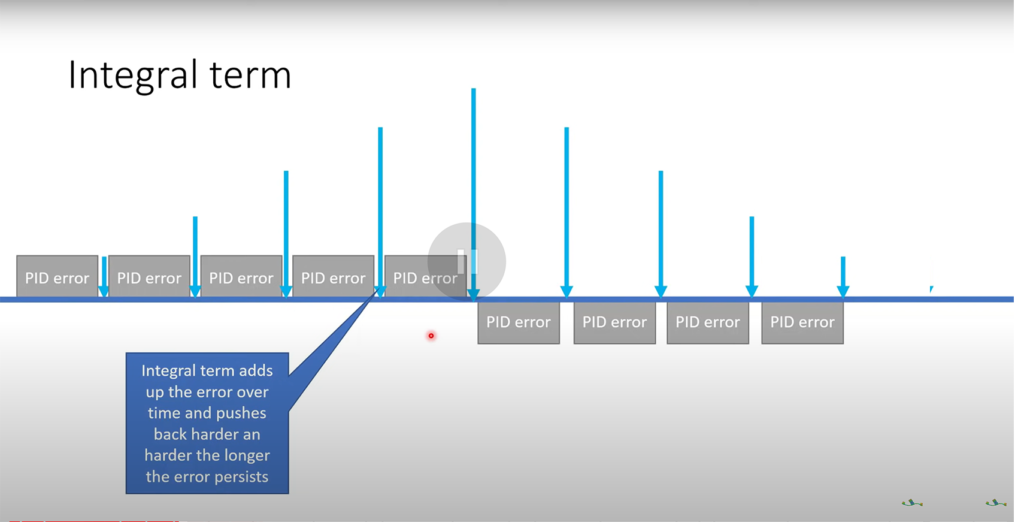
Integral (I):
Integral control addresses the accumulated error over time by integrating the error signal. It continuously sums up the past error values and applies corrective action to eliminate any steady-state error.
The integral term of PID tuning adjusts motor speeds based on the accumulated error over time, addressing any persistent deviations from the desired setpoint, such as steady drift or bias.
When dealing with PID, another crucial term to consider is…
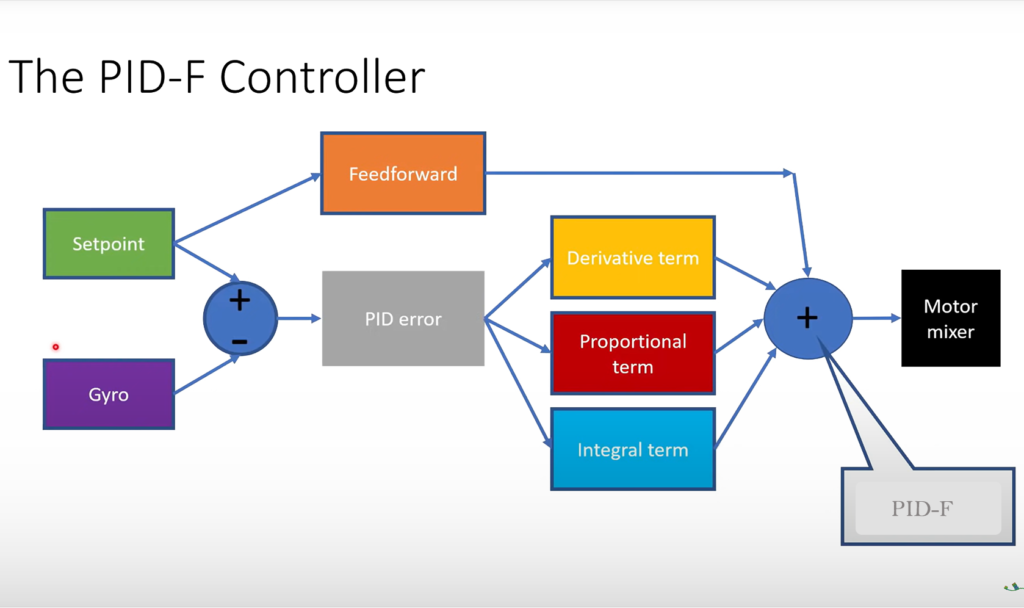
Feedforward:
Feedforward is a feature that complements the primary control provided by the P gain. While the P gain reacts to errors between the setpoint and the gyro’s feedback, it can sometimes introduce a delay in response.
Feedforward addresses this delay by predicting the desired movement based on how quickly the pilot moves the control stick. By doing so, the flight controller initiates the drone’s movement earlier, enhancing the tracking of the setpoint.

Fine-tuning PID values for each quadcopter requires taking into account factors such as weight distribution, thrust-to-weight ratio, motor torque, and propeller weight and pitch. This ensures optimal performance in various scenarios, including crashes and changes in battery placement, necessitating adjustments to accommodate a wide range of situations.
Cardio
0600 – 0700 Hours
Monday
Yoga
0600 – 0700 Hours
Monday
Weights
0600 – 0700 Hours
Monday
Zumba
0600 – 0700 Hours
Monday
Aerobics
0600 – 0700 Hours
Monday
Meditation
0600 – 0700 Hours
Monday
Flexibility
0600 – 0700 Hours
Monday
Strength
0600 – 0700 Hours
Monday
Toning
0600 – 0700 Hours
Monday

Training Rates
I am currently in California and will be taking bookings from September 2020.
$275
Diet Or Fitness Report
- Genetic sample test kit
- Your genetic diet or exercise report
- Diet plan or Exercise suggestions
$425
Diet & Fitness Report
- Genetic sample test kit
- Your genetic diet & exercise report
- Diet & Exercise Summary Infographic
- Diet plan
- Exercise suggestions
$550
Diet & Fitness Max
- Genetic sample test kit
- Your genetic diet & exercise report
- Diet & Exercise Summary Infographic
- Diet plan
- Exercise suggestions
- In-Body Analysis
- Weekly Check ups
Training Gallery
Lorem ipsum dolor sit amet, consectetur adipiscing elit. Ut elit tellus, luctus nec ullamcorper mattis, pulvinar dapibus leo. Donec Sodales Sagittis Magna.

My Clients
Lorem ipsum dolor sit amet, consectetur adipiscing elit. Ut elit tellus, luctus nec ullamcorper mattis, pulvinar dapibus leo. Donec Sodales Sagittis Magna. Sed Consequat, Leo Eget Bibendum Sodales, Augue Velit Cursus Nunc, Quis Gravida Magna Mi A Libero. Nam at congue diam.

Angellica Grey
Model
Ryan Neason
Entrepreneur
Brandon Parker
Body Builder
Frida James
Adventurer
Natalie Foster
Tennis Player
What People Say About Me
Sed Fringilla Mauris Sit Amet Nibh. Donec Sodales Sagittis Magna. Sed Consequat, Leo Eget Bibendum Sodales, Augue Velit Cursus Nunc, Quis Gravida Magna Mi A Libero.
