
FLIGHT CONTROLLER
THE BRAIN
A Flight Controller (FC) is a crucial component in a drone that functions as its brain. It plays a central role in managing and coordinating the speed of each motor. Similar to a motherboard in a computer, the FC serves as the hub for communication between various parts of the drone. Pilots provide instructions to the FC, which interprets these commands and translates them into coordinated movements for each motor. In essence, the FC ensures that the drone operates smoothly and responds accurately to pilot input.
Clock Speed (MPU/MCU Generation):
- Clock Speed: This refers to how quickly the processor can execute instructions. It’s measured in Hertz (Hz) and is crucial for the speed at which the Flight Controller can process data.
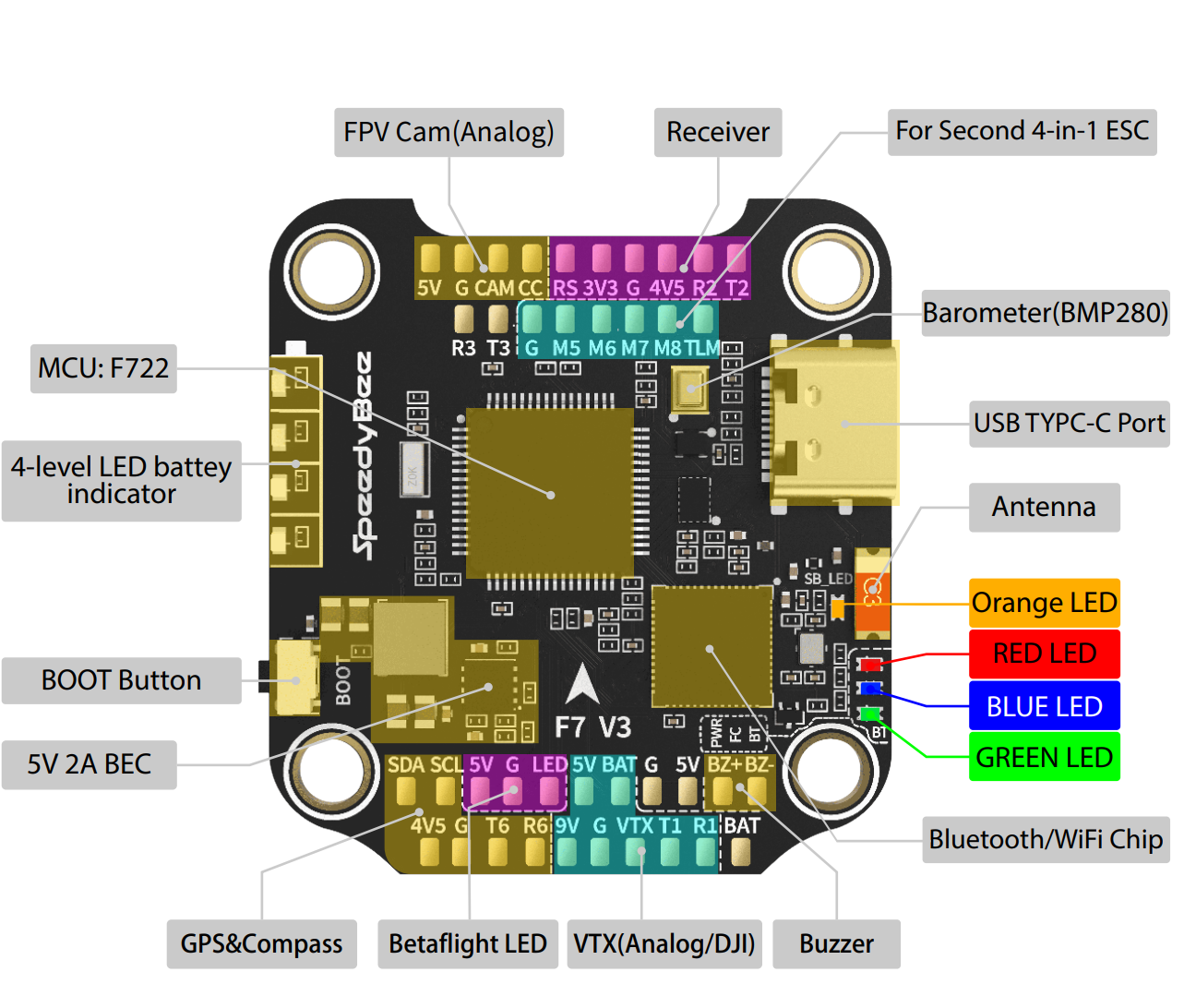
- MPU/MCU Generation: MPU stands for MicroProcessing Unit, and MCU stands for MicroController Unit. These terms are often used interchangeably. They refer to the type of microprocessor on the Flight Controller. The “F” designation, such as F4 or F7, is a naming convention for STM32 microprocessors by STMicrosystems which are commonly used. Higher numbers (like F7) generally mean more advanced processors with faster capabilities. F4 (~168MHz) and F7 (~216MHz)
Gyroscope:
- The gyroscope on the Flight Controller is a sensor that measures the drone’s attitude (orientation) and rotational velocity. It helps the Flight Controller understand how the drone is positioned in space and how it is moving.
- MPU6000 and ICM-20602 are specific models of gyroscope sensors which are commonly available on market.
Accelerometers:
- These sensors measure acceleration, but they are not always necessary for drones flown in Acro Mode (manual control without stabilization). In such cases, accelerometers can be disabled in the Flight Controller’s firmware to free up processing power.
Loop Time:
The frequency at which the Flight Controller (FC) performs calculations is known as its “loop time.” Most FCs operate at 8,000 cycles per second, meaning they execute 8,000 calculations every second. Each of these cycles is referred to as a PID loop.
PIDs (Proportional-Integral-Derivative):
PID stands for Proportional, Integral, and Derivative, which are three types of control actions used in the PID loop. In simple terms, the PID loop helps the FC interpret and respond to your commands accurately. It continuously compares your stick inputs with the quadcopter’s orientation. If there’s a difference, corrections are automatically applied to bring the quadcopter back in line