

FPV drones may appear complex at first due to the large number of electronic components, systems, and technical terms involved. However, every FPV drone is built from a combination of interconnected components that work together to control flight, generate thrust, transmit video, and maintain stable operation in the air.
Understanding the components of an FPV drone is one of the most important steps in learning FPV technology. From the flight controller and ESCs to motors, propellers, batteries, cameras, and video transmitters, each part plays a specific role in the overall performance and flying experience of the drone.
This guide explains the essential components used in modern FPV drones and how these systems work together to achieve precise control, responsive flight, and immersive real-time flying.
Working – Basic Overview
The working of an FPV drone starts with the pilot giving control inputs through the radio controller, also known as the transmitter. These signals are sent wirelessly to the drone, allowing it to respond to movements such as throttle, pitch, roll, and yaw in real time.
At the same time, the onboard FPV camera continuously transmits live video back to the pilot’s FPV goggles or display screen. This allows the pilot to see from the drone’s perspective while flying.
As the pilot observes the drone’s movement and position through the live video feed, new control inputs are continuously sent to the drone for correction and navigation. This continuous exchange between pilot control and real-time video feedback is what creates the immersive and highly responsive FPV flying experience.
This is only the basic idea of how an FPV drone works. As we move through the individual components later in this guide, we will revisit the same process in much greater detail. By that point, the complete working of an FPV drone will make much more sense and help you better understand how all the systems work together during flight.
Main Components of an FPV Drone
- Frame
- Flight Controller (FC)
- Electronic Speed Controller (ESC)
- Brushless Motors
- Propellers
- Radio Receiver (RX)
- FPV Camera
- Video Transmitter (VTX)
- Antennas
- FPV Goggles
- LiPo Battery
- Radio Controller / Transmitter (TX)
To better understand how these components interact during flight, the complete FPV drone system can be divided into three main sections: the input system, output system, and feedback system.
Input – Radio Controller / Transmitter (TX), Radio Receiver (RX), Flight Controller (FC)
Output– Battery, Electronic Speed Controllers (ESC), Brushless Motors, Propellers
Feedback-FPV Camera, Video Transmitter (VTX), Antennas, FPV Goggles
Frame
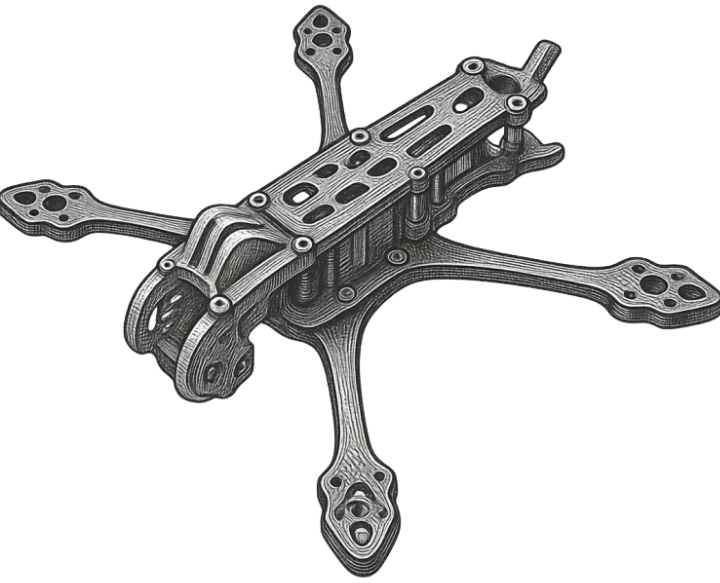
The frame is the main structural body of the FPV drone that holds and supports all the components together, including the motors, flight controller, ESC, camera, and battery. It plays an important role in the durability, weight, stability, and overall flying characteristics of the drone.
Most FPV drone frames are made from carbon fiber because of its high strength, lightweight properties, and vibration resistance. FPV frames are available in different sizes and designs depending on the intended flying style, such as freestyle, racing, cinematic, or long-range flying.
The frame layout also affects component placement, airflow, camera angle, and maintenance accessibility during repairs or upgrades.
Radio Controller / Transmitter (TX)

The radio controller, also known as the transmitter, is the device used by the pilot to control the FPV drone during flight. Stick movements and switch inputs are converted into wireless signals and transmitted to the radio receiver (RX) installed on the drone in real time.
In FPV flying, the transmitter controls movements such as throttle, pitch, roll, and yaw, allowing the pilot to maneuver the drone accurately during flight. Most FPV pilots use a Mode 2 layout, where the left stick controls throttle and yaw, while the right stick controls pitch and roll.
Modern FPV systems use different radio communication protocols such as FrSky, Crossfire, and ELRS (ExpressLRS), with ELRS currently being one of the most popular choices due to its low latency, long range, and reliable performance.
Radio Receiver (RX)

The radio receiver, commonly known as the RX, is installed on the FPV drone and is responsible for receiving wireless control signals transmitted from the radio controller. It acts as the communication link between the pilot and the drone during flight.
Once the receiver gets the control signals from the transmitter, it passes them to the flight controller for further processing. For proper communication, both the transmitter (TX) and receiver (RX) must support the same radio protocol, such as FrSky, Crossfire, or ELRS (ExpressLRS).
The reliability and quality of this radio link are extremely important for maintaining stable control and safe operation of the drone. Modern FPV systems widely use ELRS receivers due to their low latency, long range, and reliable signal performance.
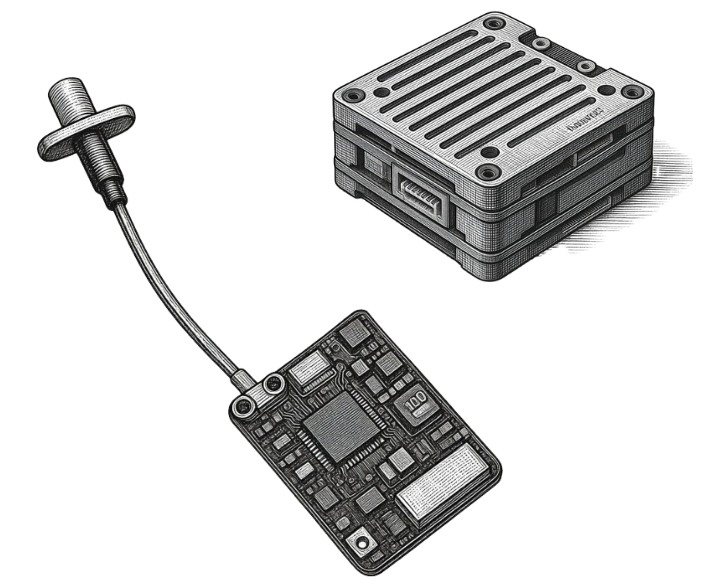
Flight Controller (FC)
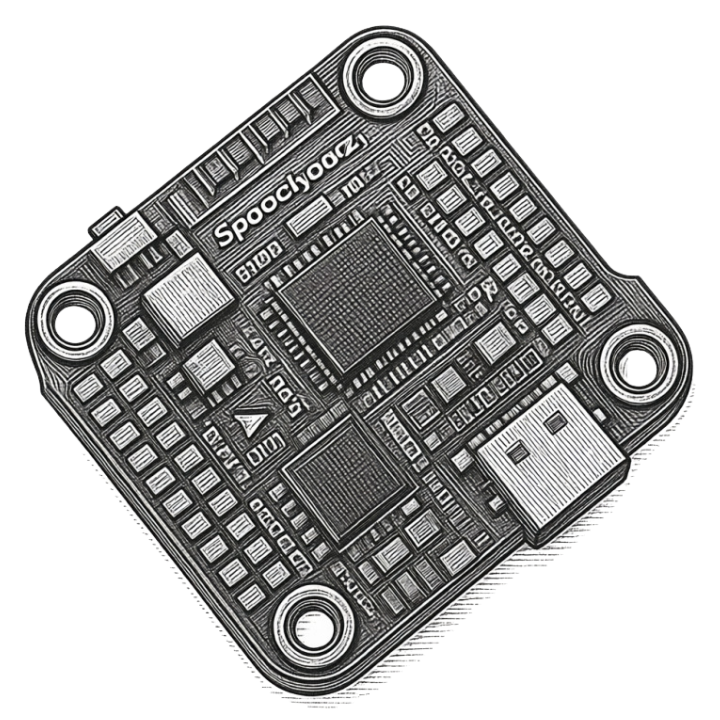
The flight controller, commonly known as the FC, is considered the brain of the FPV drone because almost all major onboard processes are managed through it. Functions such as stabilization, OSD (On-Screen Display), telemetry, flight processing, and communication with other onboard systems are handled by the flight controller during operation.
The FC receives control signals from the radio receiver, processes flight data, and continuously controls the motors to keep the drone stable and responsive during flight. Flight controllers contain sensors such as gyroscopes and accelerometers that detect the drone’s movement and orientation in real time.
Based on the pilot’s inputs and sensor data, the flight controller sends commands to the Electronic Speed Controllers (ESCs) to adjust motor speeds accordingly. FPV drones mostly use Betaflight firmware with flight controllers based on processors such as F4, F7, and H7.
Battery

The battery is the main power source of the FPV drone and supplies electrical energy to all onboard systems during flight. FPV drones mainly use Lithium Polymer (LiPo) batteries because they can deliver high current output required for fast throttle response, rapid acceleration, and high-performance flying.
Different battery voltages and capacities are used depending on the drone size and flying style. Common FPV battery configurations include 4S and 6S LiPo batteries, which are widely used in freestyle, racing, and cinematic FPV drones.
Some long-range FPV setups also use Lithium-Ion (Li-ion) batteries due to their higher energy density and longer flight endurance. However, LiPo batteries remain the most commonly used choice in FPV flying because of their high discharge capability and responsive performance.
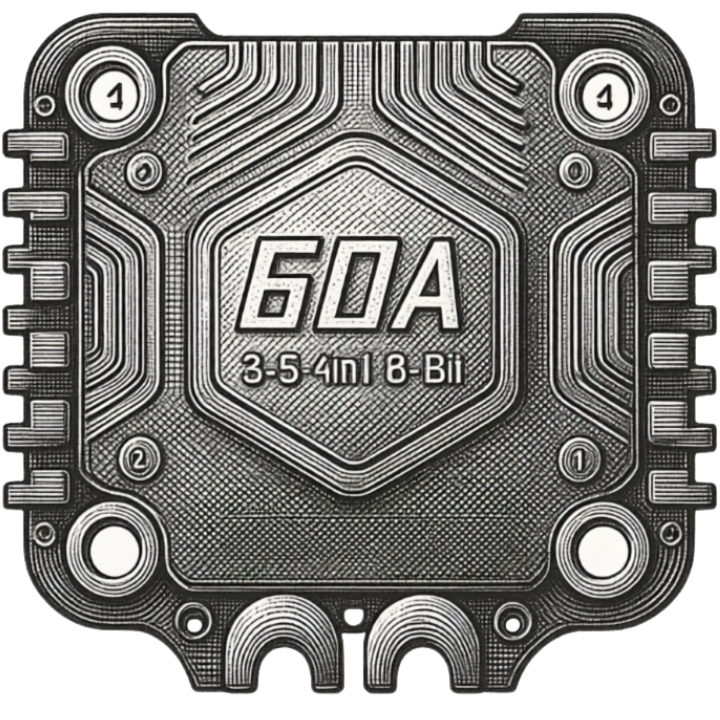
Electronic Speed Controller (ESC)
The Electronic Speed Controller, commonly known as the ESC, is responsible for controlling the speed of the brushless motors in the FPV drone. It receives commands from the flight controller and adjusts motor speed accordingly during flight.
ESCs convert electrical power from the battery into controlled three-phase power required for driving brushless motors. By rapidly increasing or decreasing motor speed, the ESC helps the drone respond accurately to pilot inputs such as throttle, pitch, roll, and yaw.
FPV drones commonly use 4-in-1 ESCs, where all four ESCs are integrated into a single board to reduce weight and simplify wiring. ESC performance plays an important role in throttle response, flight smoothness, and overall reliability of the drone.
Brushless Motors

Brushless motors generate the rotational force required to spin the propellers and produce thrust for the FPV drone. The speed of each motor is continuously controlled by the ESC based on commands from the flight controller during flight.
Most FPV drones use four brushless motors arranged in a quadcopter configuration. By changing the speed of individual motors, the drone can perform movements such as throttle, pitch, roll, and yaw.
FPV motors are available in different sizes and KV ratings depending on the drone size and flying style. Higher KV motors generally provide faster RPM and aggressive response, while lower KV motors are often used for efficiency and smoother flight characteristics.
Propellers
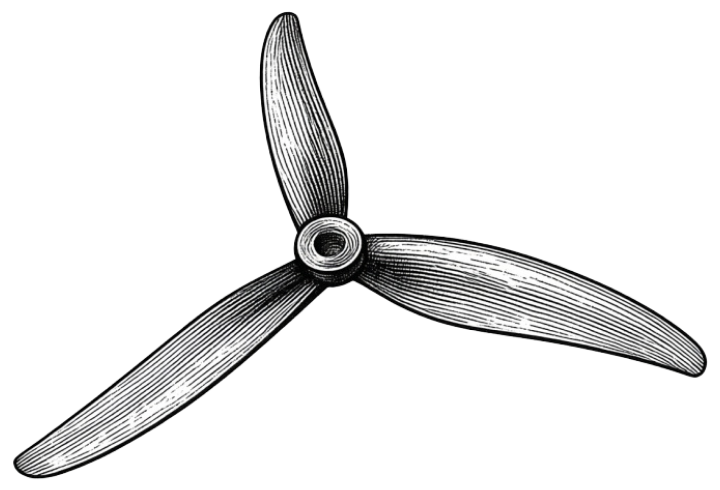
Propellers convert the rotational force generated by the brushless motors into thrust, allowing the FPV drone to lift and move through the air. Most quadcopters use four propellers, with two rotating clockwise and the other two rotating counterclockwise to maintain stability during flight.
FPV propellers are available in different sizes, blade counts, and pitch designs depending on the performance requirements of the drone. The size of an FPV drone is commonly identified by its propeller size. For example, a “5-inch drone” refers to a drone using 5-inch propellers.
Propeller pitch represents how aggressively the propeller moves air during rotation. Higher pitch propellers generally provide stronger thrust and faster response, while lower pitch propellers offer smoother and more efficient flight characteristics.
FPV Camera
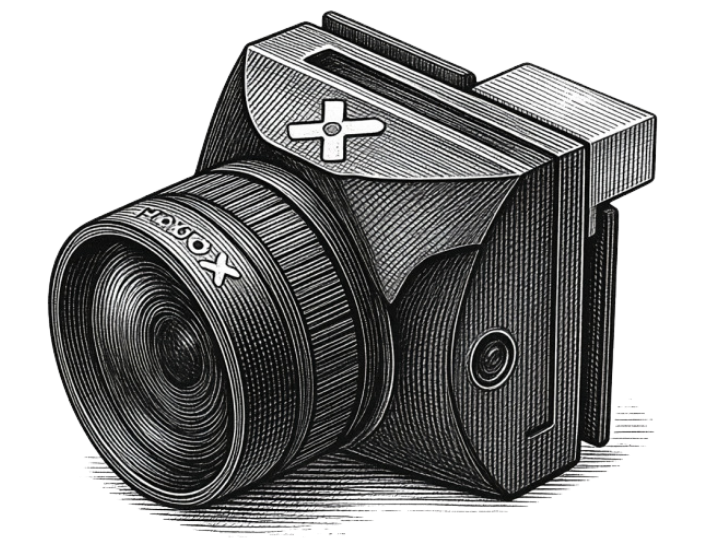
The FPV camera captures real-time video from the drone and sends it to the video transmitter during flight. This live video feed allows the pilot to see from the drone’s perspective through FPV goggles or a display screen.
Unlike normal action cameras, FPV cameras are designed for very low latency and fast light adjustment to provide responsive real-time flying performance. FPV cameras are available in both analog and digital systems depending on the video transmission setup used in the drone.
Factors such as image quality, latency, field of view (FOV), and low-light performance play an important role in the overall FPV flying experience.
Video Transmitter (VTX)
The Video Transmitter, commonly known as the VTX, is responsible for transmitting the live video signal from the FPV camera to the pilot’s FPV goggles or display screen during flight.
The VTX receives video data from the camera and wirelessly transmits it using radio frequencies in real time. The transmission range and video quality mainly depend on factors such as output power, antenna quality, surrounding interference, and the type of video system used.
FPV drones commonly use either analog or digital video transmission systems. Many VTX units also support adjustable power levels and channel settings for different flying environments and signal requirements.
Antennas

Antennas are responsible for transmitting and receiving radio and video signals in the FPV system. They play an important role in maintaining signal strength, video quality, and communication reliability during flight.
FPV drones commonly use separate antennas for the radio receiver and the video transmission system. Different communication systems operate on different frequency bands such as 2.4 GHz, 5.8 GHz, 915 MHz, and 868 MHz depending on the application and protocol used.
In most FPV setups, video transmission commonly operates on 5.8 GHz, while radio control systems may use frequencies such as 2.4 GHz or 915 MHz for long-range communication. The quality, placement, and orientation of the antennas can significantly affect range, signal penetration, and overall flying performance.
Antennas are available in different designs and polarizations, such as linear and circular polarized antennas, depending on the communication system and flying requirements.
FPV Goggles
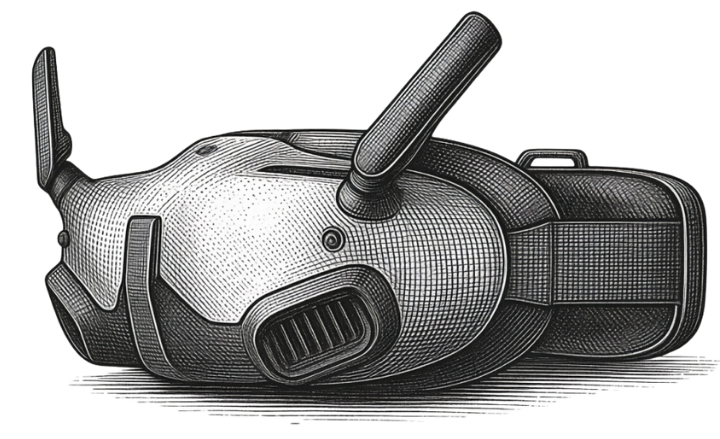
FPV goggles are used by the pilot to view the live video feed transmitted from the drone during flight. They create the immersive First Person View experience by allowing the pilot to see directly from the drone’s perspective in real time.
FPV goggles receive video signals from the video transmitter (VTX) installed on the drone and display them with minimal delay to maintain responsive control during flight. Most FPV systems use either analog or digital video transmission depending on the setup and flying requirements.
Factors such as image quality, latency, field of view (FOV), comfort, screen resolution, and receiver compatibility play an important role while choosing FPV goggles for different flying styles and applications.
Working – Complete Overview
The FPV Control Loop
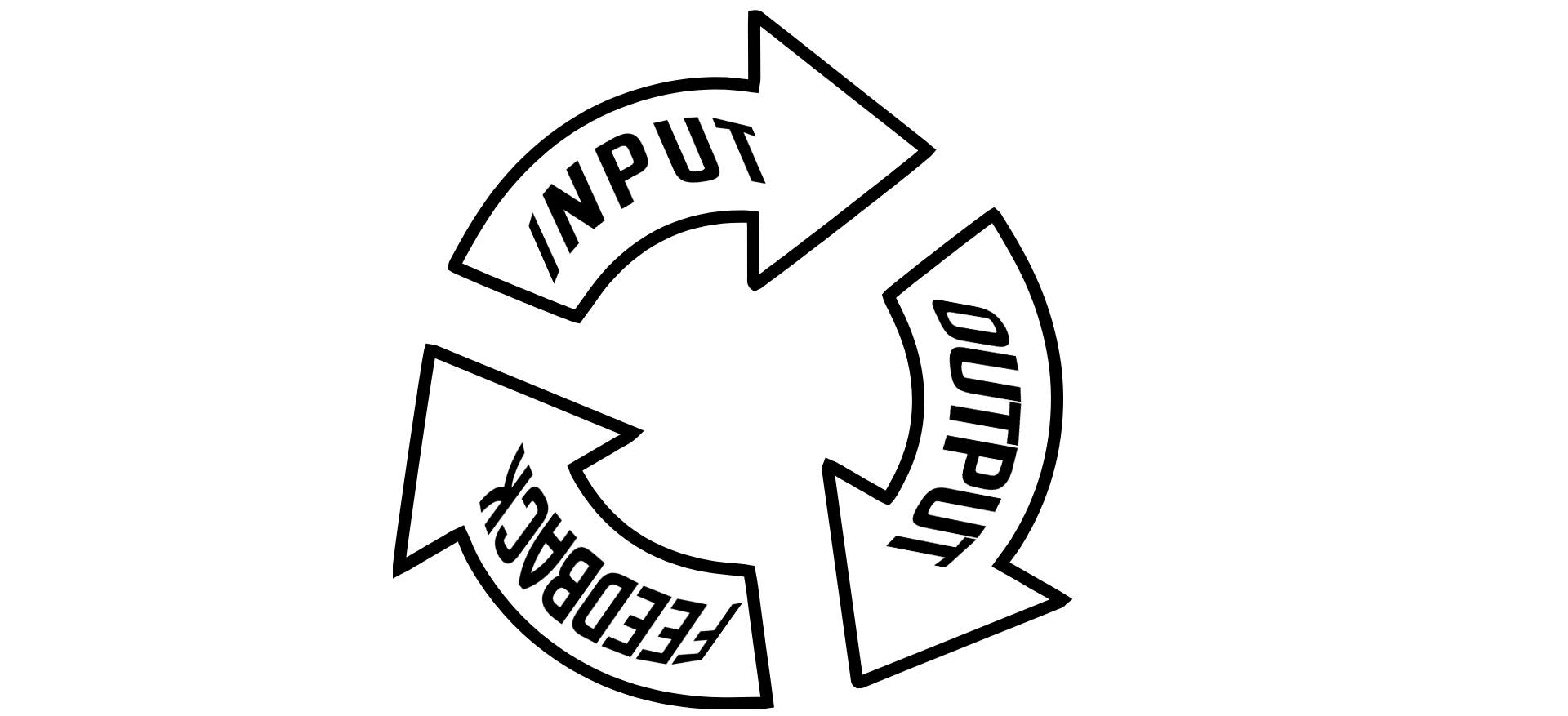
INPUT – Pilot Control
The Input System is responsible for translating the pilot’s intentions into commands that the drone can understand.
When the pilot moves the sticks on the radio controller (TX), the transmitter converts those stick movements into wireless radio signals. The radio receiver (RX) installed on the drone receives these signals and passes them to the flight controller (FC).
The flight controller then interprets the pilot’s commands and determines how the drone should respond.
Pilot → Transmitter (TX) → Receiver (RX) → Flight Controller (FC)
At this stage, the flight controller has received the pilot’s instructions and sends these signals to the power system.
OUTPUT – Power System
The Power System is responsible for physically executing the commands received from the flight controller. It converts electrical energy stored in the battery into the thrust required for flight.
The flight controller sends commands to the Electronic Speed Controllers (ESCs). The ESCs draw power from the LiPo battery and precisely regulate the speed of each brushless motor according to the instructions received from the flight controller.
As the motors spin the propellers, thrust is generated and the drone moves according to the pilot’s commands.
Flight Controller (FC) → ESCs → Motors → Propellers
Power Flow:
LiPo Battery → ESCs → Motors → Propellers
As the drone responds to the pilot’s inputs, the resulting movement is captured by the FPV video system and sent back to the pilot in real time.
FEEDBACK – FPV Video System
The FPV Video System provides real-time visual feedback to the pilot during flight. It allows the pilot to see the drone’s position, movement, and surroundings from the aircraft’s perspective.
As the drone moves, the FPV camera continuously captures live video. The Video Transmitter (VTX) then broadcasts this video signal through the antenna to the pilot’s FPV goggles or display screen.
FPV Camera → VTX → Antenna → FPV Goggles
By observing the live video feed, the pilot can assess the drone’s movement and make new control inputs through the radio controller. These commands are transmitted back to the drone, and the entire process repeats continuously throughout the flight.
This continuous loop between pilot control, drone response, and visual feedback is what makes FPV flying immersive, responsive, and precise.

Add a Comment